Der Bau von Humanoiden ist komplex, und der Fortschritt hängt häufig davon ab, wie schnell Teams den gesamten Entwicklungszyklus durchlaufen können: Demonstrationen sammeln, Daten generieren und verfeinern, Richtlinien trainieren, in Simulationen testen, den gesamten Software-Stack validieren und auf echter Hardware bereitstellen. Entwickler müssen heute viele voneinander getrennte Tools und Übergaben über diesen Workflow hinweg bewältigen.
Wichtige Updates für NVIDIA Isaac GR00T, eine offene, durchgängige Entwicklungsplattform für humanoide Roboter, beschleunigen diesen Zyklus. Die Plattform vereint Technologien wie Isaac Teleop, Isaac Lab, Isaac Sim, Isaac ROS, offene GR00T-Modelle und NVIDIA Jetson Thor für Echtzeit-Inferenz und -Steuerung und bietet Entwicklern einen durchgängigen Pfad, um von den Daten bis zur Bereitstellung zu gelangen.
Agility, Boston Dynamics, Dyna Robotics, Figure, FieldAI, Noble Machines, Richtech Robotics und Skild AI nutzen Kernkomponenten des Robotik-Stacks für Humanoide von NVIDIA, um die Roboterentwicklung zu beschleunigen.
Das Entwicklungs-Flywheel gewinnt bereits an Fahrt. GR00T-Modelle wurden 274.000-mal heruntergeladen, während der GR00T X Embodiment Sim-Datensatz auf Hugging Face mehr als 10 Millionen Downloads überschritten hat.
Isaac GR00T-Updates beschleunigen die Roboterentwicklung
Isaac Teleop, jetzt allgemein verfügbar, ist ein Open-Source-Framework für die Echtzeit-Teleoperation von Robotern und die Datenerfassung über simulierte und physische Roboter hinweg. Es verbindet Extended-Reality-Headsets, Handschuhe, Motion-Tracker und andere Teleoperationsgeräte mit Workflows, die in Isaac Lab, Isaac Sim, ROS 2 und Isaac ROS integriert sind, und reduziert doppelte Arbeit.
Führende Hersteller von Teleoperationsgeräten wie PICO unterstützen Isaac Teleop nativ, und Robotikentwickler wie Foxconn und Lightwheel integrieren es in ihre Trainings-Pipelines.
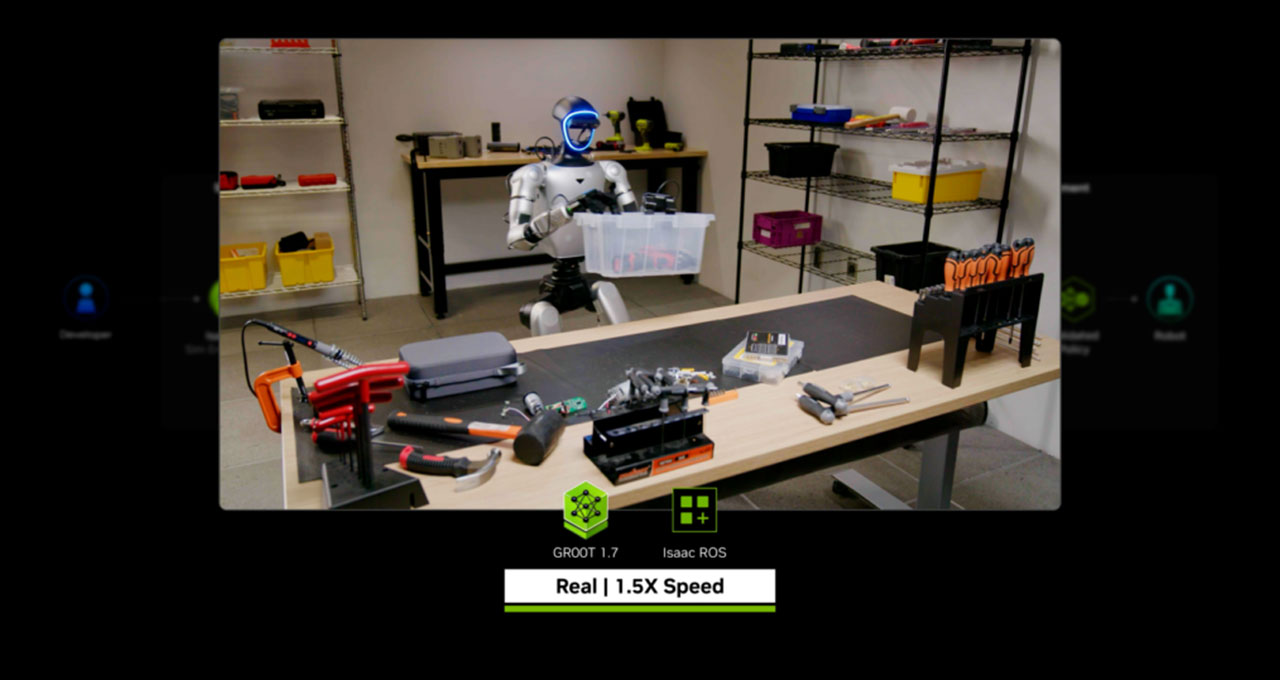
Das neueste GR00T 1.7-Modell – vortrainiert mit 20.000 Stunden egozentrischer menschlicher Daten und aufgebaut auf Cosmos Reason 2 als Grundlage – ermöglicht komplexere beidhändige und feinmotorische Manipulationsaufgaben, wie das Auswählen einer Karte aus einem Stapel und das Einstecken in einen Halter. GR00T 1.7 ist derzeit im Early Access verfügbar, in LeRobot von HuggingFace integriert und unter einer kommerziellen Lizenz erhältlich, sodass Entwickler abgeleitete Modelle über Forschungsumgebungen hinaus erstellen und bereitstellen können.
Techman Robot nutzt die GR00T-Entwicklungsplattform und das GR00T 1.7-Modell, um seine Entwicklungs-Pipeline zu beschleunigen und KI schneller in den realen industriellen Einsatz zu bringen.
Künftige Veröffentlichungen offener Isaac GR00T-Modelle, die nun Teil der OpenMDW-1.1-Lizenz der Linux Foundation sind, werden unter einer einzigen, modellzentrierten Lizenz verfügbar sein, was es Entwicklern erleichtert, GR00T-Modellmaterialien über Robotik-Workflows hinweg zu erstellen, anzupassen und bereitzustellen.
Enactic und Nexuni integrieren GR00T 1.7, um Robotern dabei zu helfen, in unvorhersehbaren Umgebungen wie Pflegeheimen und Wäschereien zu reflektieren, sich anzupassen und zu agieren.
Darüber hinaus erweitert die Isaac Lab 3.0 Developer Preview das Roboterlernen durch reichhaltigere Physik mittels Integration der Newton-Physik-Engine und Multi-GPU-Skalierung für große Experimente mit physischer KI. Entwickler können Richtlinien gegen realistischere Szenarien trainieren, einschließlich komplexer Mechanismen, Materialien und Umgebungen. Einheitliche Aktormodelle über Isaac Lab und Isaac Sim hinweg helfen, Abweichungen zwischen dem Lernen von Richtlinien und dem Software-in-the-Loop-Testen zu reduzieren und Probleme vor der Full-Stack-Validierung oder Hardware-Bereitstellung aufzudecken.
Flexion AG hat mit Isaac Lab eine bis zu fünffache Beschleunigung beim Training von Wahrnehmungs-Workloads für Richtlinien zur Fortbewegung und Manipulation von Humanoiden erreicht.
Isaac Sim 6.0, jetzt allgemein verfügbar, bietet Entwicklern eine Simulationsumgebung, um das Roboterverhalten zu validieren und den gesamten Software-Stack vor der Bereitstellung zu testen. Neue Agent-Skills helfen Teams, Simulations-Workflows zu automatisieren, während Newton-Authoring und Software-in-the-Loop-Testing es ermöglichen, in Isaac Lab trainierte Richtlinien gegen realistischere Robotersoftware und -physik zu evaluieren. Das Release fügt außerdem mehr als 1.000 simulationsbereite, greifbare Assets hinzu, um das Testen von Manipulationen zu beschleunigen.
RLWRLD entwickelte sein Fingerfertigkeits-Foundation-Modell RLDX-1 mit Isaac Sim, während Robotiq Isaac Sim in seine offenen Workflows für taktile Wahrnehmung integriert hat, um kontaktreiche Manipulationen zu verbessern. Lyte arbeitet mit NVIDIA zusammen, um die multimodale Echtwelt-Erfassung von LyteVision mit Isaac Sim-, OpenUSD-, SimReady- und NVIDIA Warp-Workflows zu verbinden und so erfasste Szenen in SimReady-Assets und -Umgebungen für das Training von Roboterwahrnehmungs- und Manipulationsrichtlinien umzuwandeln.
Das letzte Element des Workflows ist die Bereitstellung. Isaac ROS 4.4 verbindet erlernte Roboterfähigkeiten aus Isaac Sim und Isaac Lab mit dem ROS 2-Software-Stack, den Sensoren und der beschleunigten Rechenleistung, die für reale Tests erforderlich sind, mit neuer Unterstützung für Extended-Reality-Teleoperation, Manipulations-Workflows und Hardware der Jetson Thor-Klasse.
Entwickler können die offene Robotik-Entwicklungsplattform NVIDIA Isaac erkunden, um die Tools, Modelle und Rechenleistung zu finden, die zur Beschleunigung der Humanoiden-Entwicklung über den gesamten Workflow hinweg erforderlich sind. Der durchgängig validierte Referenz-Workflow von den Daten bis zur Bereitstellung wird in der zweiten Jahreshälfte verfügbar sein.
Sehen Sie sich die GTC Taipei-Keynote von NVIDIA-Gründer und CEO Jensen Huang an und erkunden Sie diese Sessions zu physischer KI.
Siehe Nutzungsbedingungen über Softwareprodukte.